Current State of Atmosensor as of November 2022
I hit a pretty good milestone yesterday so it seemed opportune timing to write something of a retrospective and goal-setting post for the project.
What’s Done So Far
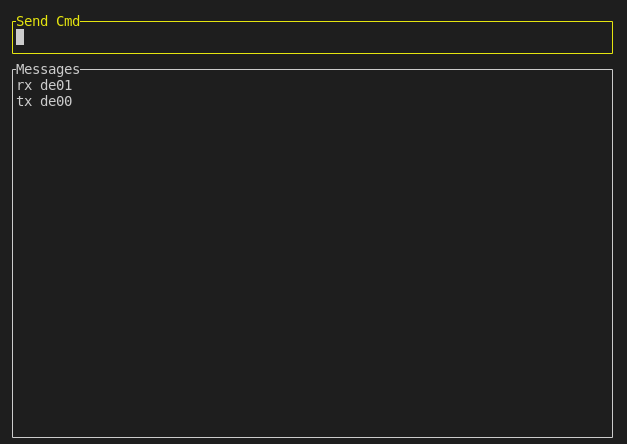
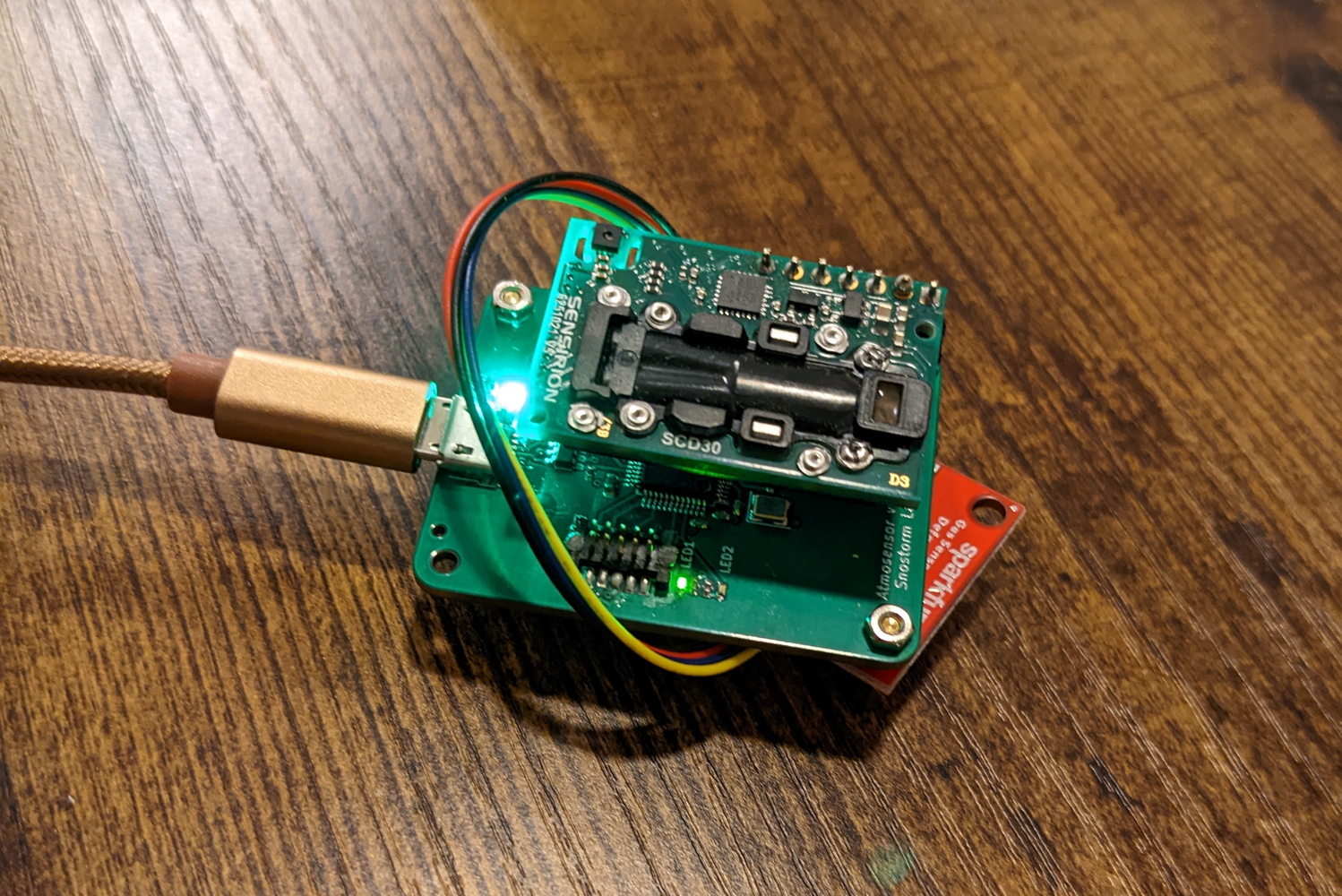
I was happy to achieve a useful milestone yesterday where I was able to plug
in the atmosensor board via USB, pull a debug serial terminal, send a two-byte
application ping command, and receive a two-byte response from the board via
the debug terminal! That said, currently these applications are a mess. Both
exist in single main.rs files and are in heavy need of refactoring.
The atmosensor-tui application in particular is a second re-implementation
of a tool that I had at a previous job for testing communications with a device
that talked a simple binary protocol. At this point it feels justifiable to try
to break that out into a library with a pluggable device transport so that
some others can benefit (and so I can stop maintaining a very similar source
project in two places).
For the microcontroller application things are even worse. I’m currently doing COBS decoding and encoding inside of the ISR handler, though I’ve implemented a simple interrupt-safe ring buffer in order to transport incoming packets to the application context so that’ll be an early refactor. I’d like to also start splitting things into various modules per responsibility including having multiple tasks called from the main loop. That’s not even getting started with driver development! There are libraries available for the sensors that I selected, even in Rust, however I noticed one issue: the construction of the library struct instances take the I2C driver by move. Since both of my devices are on one bus, this makes it impossible for me to use these libraries without breaking some of the guarantees of Rust. I’m pretty puzzled by this since it seems like it’s common throughout the ecosystem and I’m not sure what the usual solution is. I’m going to end up re-writing these drivers to take a the I2C driver by reference on every method call. Unfortunate, but no other workaround is immediately obvious.
As I develop the drivers I’ll be quickly expanding the protocol for USB as this is the easiest way to debug for me. I’m not expecting any scripts for generating protocol structs soon as I can get by without that automation for a while, but it’s on my radar as it’d also make it easier to improve the TUI to give a preview of the fields available after the two command bytes are typed in or other possibilities like being able to browse over the previous binary commands in the history to see what all of the data is wihtout having the memorize the protocol.
Once the firmware application is fairly stable, I’ll be looking at developing a proper PC host application for reading data and storing it somewhere, but that still appears to be a ways off. I should probably start thinking about designing an enclosure for this too…
If you notice a dead link or have some other correction to make, feel free to make an issue on GitHub!